
SED-GRA HOME
Stage 2 : Fusion de capteurs de localisation sur véhicule Cycab
Mots-Clés
- Localisation
- Odométrie
- GPS
- Fusion de données
Niveau Requis
BAC +4/ 5 (Ecole d'ingénieurs, Masters)
Maître de stage
Nicolas Turro (SED).
Candidature
Envoyer CV et lettre de motivation à Nicolas Turro.
Description du stage
Durée
4 à 6 mois
Contexte
Le stage se déroulera au sein du service Support Expérimentations et Développements (SED) de l'INRIA Rhône-Alpes dont un des rôles est la mise en oeuvre des outils matériels et logiciels pour les expérimentations en Robotique mobile pour les équipes projets du centre de recherche. Le robot Cycab est un véhicule automobile autonome de la taille d'une voiture sans permis. Il est utilisé par les chercheurs de l'équipe-projet e-motion pour tester les applications de leurs travaux de recherche. Plusieurs résultats ont été obtenu, notamment dans le domaine de la planification de trajectoire, de la localisation, de la modélisation de l'environnement et de la navigation réactive.
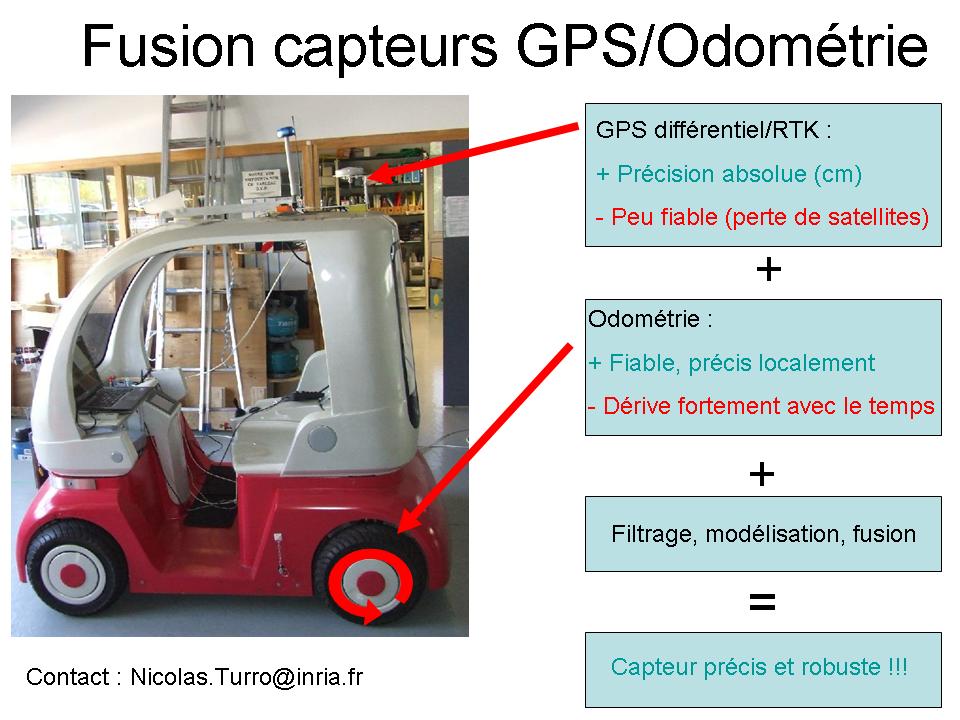
Ce véhicule est doté de capteurs proprioceptifs permettant sa localisation : capteurs d'odométrie et capteur GPS centimétriques. Ces deux sources de localisations ont des dérives ou des défauts de fonctionnement qui ne permettent pas leur usage exclusif : le GPS peut perdre la vision des satellites et a une faible fréquence de mesure. L'odométrie, quand à elle, a une forte dérive temporelle.
L'objectif du stage consiste donc à reconstruire en temps réel une position fiable du cycab en combinant les mesures GPS et odométriques :
Travail du stagiaire
Les informations de positions GPS ainsi que l'odométrie de chaque roue sont aisément accessible, le travail du stagiaire se focalisera sur le traitement de ces données dans un programme C++ pour produire une information de position.
Dans un premier temps, le stagiaire se familiarisera avec l'API et les structures de données utilisée par le middleware 'Maison' Hugr qui permet de recevoir les données capteurs et de poster une nouvelle estimée de la position.
Le stagiaire devra ensuite reconstruire la position et le cap du véhicule en utilisant l'odométrie d'une ou plusieurs roues et comparer la fiabilité du résultat en se servant de la position retournée par le GPS.
Une fois l'algorithme odométrique mis au point, on s'intéressera à combiner GPS et odométrie pour fournir une estimée de la position du Cycab toutes les 10 millisecondes (le GPS ne fournissant ses données que toutes les 10ms).
Enfin, on s'intéressera au cas où le GPS a un fonctionnement momentanément dégradé (perte de la position centimétrique par manque de visibilité satellite). Il s'agira alors de détecter ces fonctionnements dégradés et de fournir une position du véhicule utilisant momentanément l'odométrie. On pourra éventuellement modéliser la dégradation de la position GPS pour l'utiliser tout de même et tenter de prévenir la dérive de position odométrique.
Compétences requises
- Programmation C++
- Notion de traitement du signal (filtre de Kalman ou méthodes bayesiennes)
Quelques liens utiles
- le service SED : https://sed.inrialpes.fr
- le Cycab : https://sed.inrialpes.fr/robvis/cycab.html
- l'équipe projet e-motion : http://emotion.inrialpes.fr
Dernière mise à jour: 19-01-2018 17:04:49.
Contact | 