Sculpture

 The main idea of this work is to provide designers, artists, sculptors with a
virtual sculpting tool allowing to interact as closely as possible to reality.
This project is co-funded by Renault and the CNRS. The main challenges achieved
here concern the material modelisation - a kind of virtual clay -, the visual
and haptic feedback, as well as the ability to customize the tool and to easily
handle the successive versions of the sculptures.
The main idea of this work is to provide designers, artists, sculptors with a
virtual sculpting tool allowing to interact as closely as possible to reality.
This project is co-funded by Renault and the CNRS. The main challenges achieved
here concern the material modelisation - a kind of virtual clay -, the visual
and haptic feedback, as well as the ability to customize the tool and to easily
handle the successive versions of the sculptures.
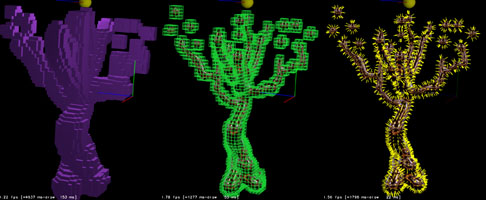
 A volumetric object description based on implicit surfaces was chosen to model
the virtual clay. The surface corresponds to an iso-value of the potential stored in the volume. This potential is sampled as scalar values on a grid.
This allows to easily take into account the object's blends/separations,
giving a low constrained surface description. It's possible to add/remove material, and then color or deform it.
A volumetric object description based on implicit surfaces was chosen to model
the virtual clay. The surface corresponds to an iso-value of the potential stored in the volume. This potential is sampled as scalar values on a grid.
This allows to easily take into account the object's blends/separations,
giving a low constrained surface description. It's possible to add/remove material, and then color or deform it.
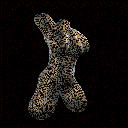
The visual feedback is given by a high-quality stereoscopic display (high
resolution, antialiasing, ...) that eases the tool location and improves the
sculpted object perception. This perception is furtherly improved with
various lights and environment textures. For example, we can use an
environment texture, which gives the sculpture a metallic aspect.
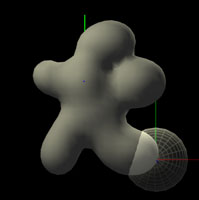
For haptic feedback, we use an articulated arm with force feedback (PHANToM)
which allows to "feel"the material resistence.
For further details: http://www-imagis.imag.fr/Membres/Eric.Ferley/sculpture/sculpt_gb.html
Contacts: Eric.Ferley@imag.fr - Marie-Paule.Cani@imag.fr